New Electrical Functionality in SOLIDWORKS 2017
“SOLIDWORKS Electrical – what’s all this 2017 stuff anyway?” is how Bob Pease, the famous integrated circuit design expert and technical author, may describe the capabilities of SOLIDWORKS Electrical 2017. He had a great way of explaining complex technical concepts and making them relatable to the general engineering population (us mere mortals).
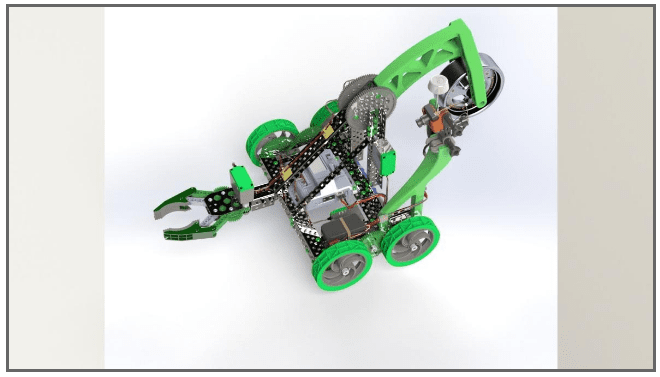
I’m no Bob Pease by any stretch of the imagination, but in putting together descriptions of the electrical features and presentation content for Fisher Unitech’s recent SOLIDWORKS 2017 product launch events, I took system design concepts and related them to a simple robot that our technical team used as a platform to demonstrate the top new enhancements and features in SOLIDWORKS 2017. I think Bob would have appreciated this straightforward, albeit entertaining, approach.
We used a claw robot from Vex Robotics as the basic platform and then recreated it using the tools in SOLIDWORKS 2017. While the rest of the team was busy modeling the mechanical bits and pieces, I started on the design for the VEX ARM Microcontroller which was used to control the motion of the robot.
New for 2017 is SOLIDWORKS PCB. SOLIDWORKS PCB is a complete professional PCB design tool that includes integration with SOLIDWORKS CAD. Using the integrated editing tools, I started placing symbols in the schematic and creating the wiring between the components. Once that was done, I compiled (Error checked) the schematic and moved over to the PCB layout. The way the editors (SOLIDWORKS Electrical Schematic and SOLIDWORKS PCB) interact make it easy to go back and forth between the two. No need to generate netlists, etc. Just run an ECO and push the data over. The footprints are now available to start placing on the PCB. Once the component placement was done, I used the auto-router to add the traces to the PCB, and after a few touch-ups with the interactive route tool, it was ready to push over to SOLIDWORKS.
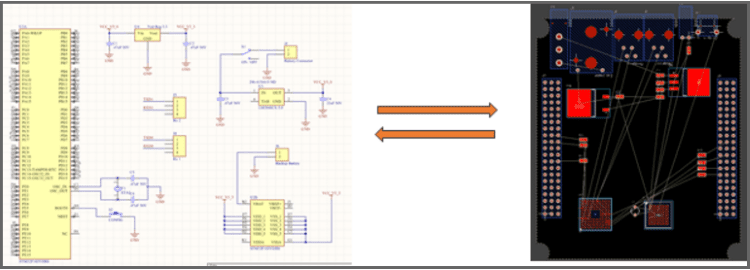
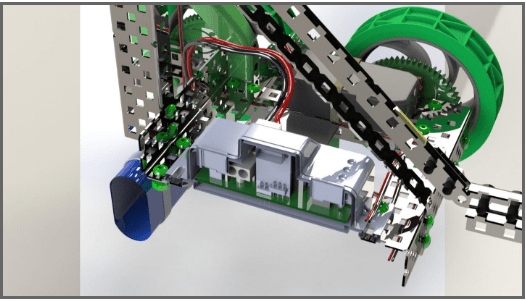
Moving the design from SOLIDWORKS PCB to SOLIDWORKS is accomplished through the use of a PCB Connector Panel. No more IDX, IDF, PROSTEP intermediate file headaches are necessary. With SOLIDWORKS PCB, I just push the design to the PCB Services and pull it into SOLIDWORKS to build the PCB Assembly. It is now ready to insert into my enclosure and ultimately into the robot assembly. The process is very simple and straightforward. Because you don’t have a bunch of intermediate neutral files to deal with, the chances for making mistakes are minimized.
The SOLIDWORKS PCB and the SOLIDWORKS Assembly are linked through a common PCB Services project so you only have one dataset to keep track of as opposed to the traditional process of putting multiple versions of translated files on a central server or worse yet, emailing them between the PCB designer and the Mechanical designer.
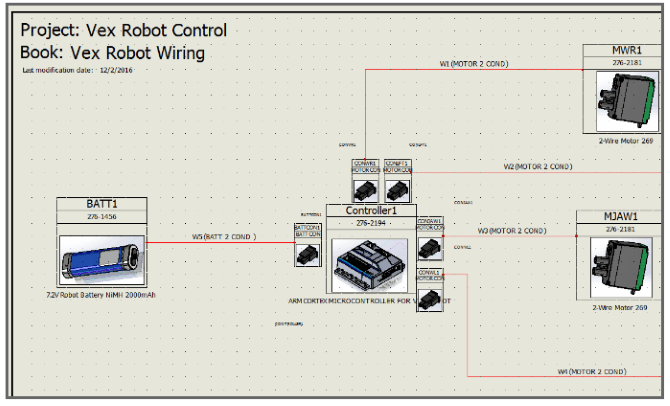
Once I had the controller into the robot assembly, I created the system wiring diagram for the motors and battery using SOLIDWORKS Electrical Schematic. Although it’s not necessary, I decided to start by doing a system layout using the line diagram tool. It’s an easy way to lay out your system at a high level before getting into the detailed wiring.
Once the connectivity was defined, I routed the wires using SOLIDWORKS Electrical 3D. Just like SOLIDWORKS PCB, SOLIDWORKS Electrical is tightly integrated with SOLIDWORKS CAD making it easy to move back and forth to make modifications or fix errors.
Building the robot was a great way to show off the SOLIDWORKS ecosystem and how it allows you to combine engineering design tools from different domains (Mechanical, Electrical, PCB, etc.) to solve real-world design challenges. Because these tools are tightly integrated with SOLIDWORKS CAD, the process of moving from one design domain to another is greatly simplified allowing you to focus on your design rather than how your design tools “talk” to one another.